pcDuino Robot走迷宫
程序说明
pcDuino Robot具有两个距离传感器,一个在正前方,一个在 正右方,我们通过这两个传感器的配合使用来指导pcDuino Robot运动,从而使小车走出迷宫。
程序
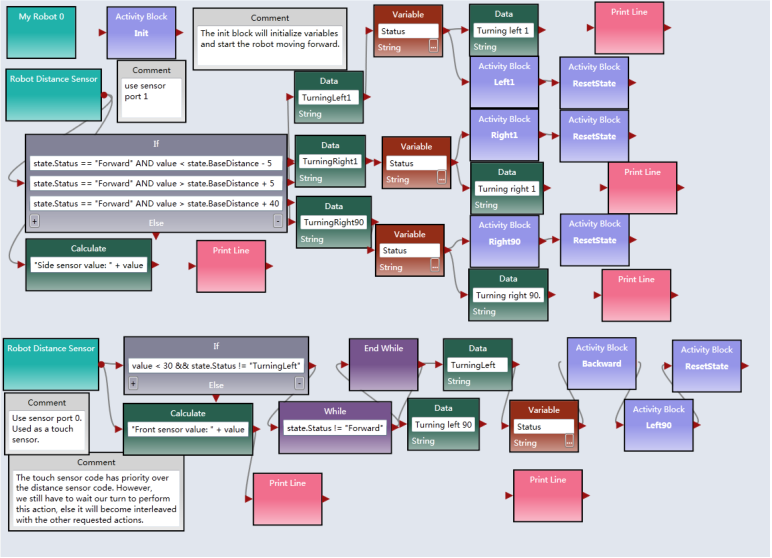
走迷宫程序由多个部分组成,我们将分成多个部分展示。
Main Diagram
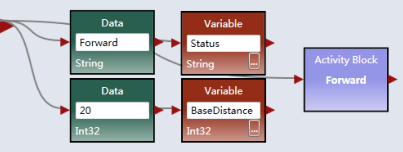
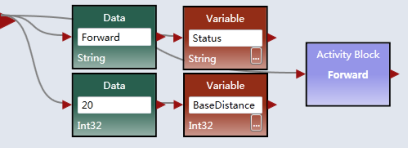
Init
Left1
Right90

Left90
Right1
Backward
ResetState

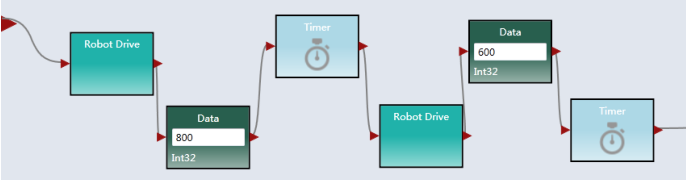
Forward
程序讲解
走迷宫程序由于比较大我们分两条主线来讲,这两条主线就是这两个超声波传感器。
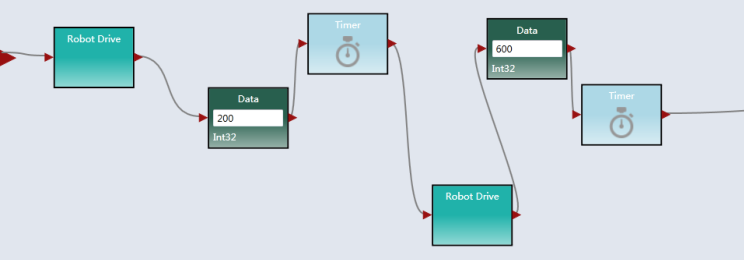
Side Sensor
Side Sensor安装在小车的正右方,当右边的障碍物距离小于15cm时,小车会向左转一定的角度,然后进入复位状态, 当右边的障碍物距离大于25cm时,小车会向右转一定的角度,然后进入复位状态,复位状态执行的是前进一段时间。当右边的障碍物距离大于60cm时,小车会向右转90度,然后进入复位状态。
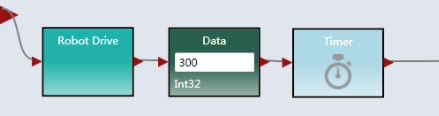
Front Sensor
Front Sensor安装在小车的正前方,当正前方的障碍物小于 30cm并且小车此时的状态不是左转弯时,如果此时小车的状态为右转弯,小车将会左转弯90度,然后后退接着左转弯90度,然后继续前进。
程序总结
小车前进过程中如果前面没有障碍物,则小车主要根据右边的传感器运动,就是依着右边的障碍物前进,当前面有障碍物且距离小于一定的距离时,如果此时的状态为右转弯则此时小车会左转弯90度然后后退并且在后退过程中左转弯九十度,然后进入复位状态。 程序中包含左转弯一定角度,右转弯一定角度,以及左右转弯90度等,这些角度是通过伺服电机的旋转速度以及旋转的时间来控制的,具体参数我没提供出来,因为伺服电机存在着差异性,所以这些参数当你拿到实际的pcDuino Robot时,需要根据实际的情况来调整。程序中的距离判断也是需要根据实际运动的距离来做调整。