让pcDuino Robot动起来
程序说明
利用VIPLE编写一个简单的让pcDuino Robot原地打转的程序。
程序
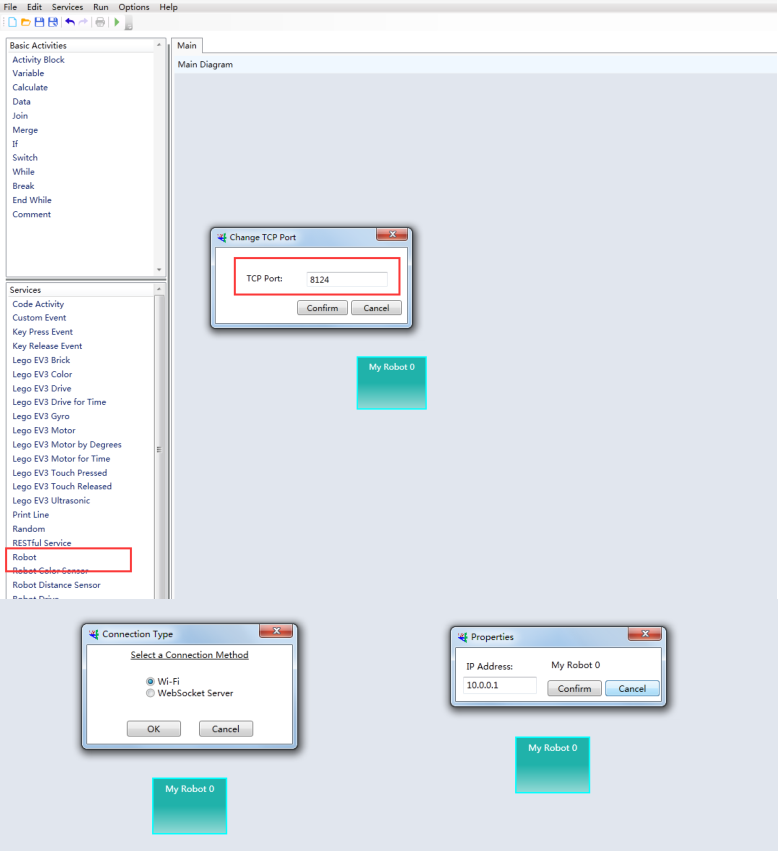
操作步骤:打开PC端VIPLE->选择Robot->TCP PORT:8124->IP Address:10.0.0.1->Connection Method:WIFI,操作步骤如下图:
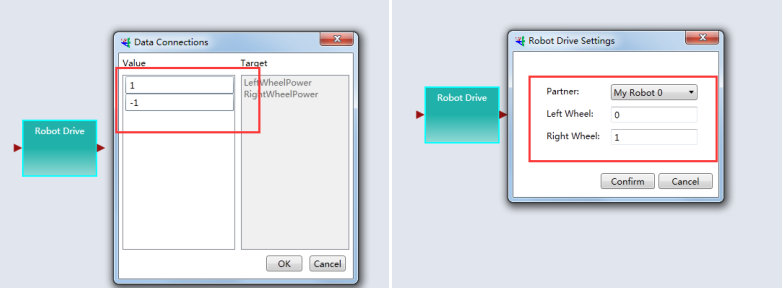
 选择Robot Drive参数设置如下图:
选择Robot Drive参数设置如下图:
 上述所有的设置完成后,打开左上角的run按钮/F5,你会发现pcDuino Robot开始原地打转了。
上述所有的设置完成后,打开左上角的run按钮/F5,你会发现pcDuino Robot开始原地打转了。
程序讲解
pcDuino Robot是通过Socket与PC端的VIPLE连接的,出厂时我 们会设置好小车WIFIAP的SSID,密码,IP以及PORT。当然这个 也可以自己修改,但是得有Linux基础。小车的伺服电机接在pcDuino3B的PIN 10和PIN11脚分别对应左右轮,对应VIPLE的编号0和1。小车的速度范围为-1~1。当Data=0时,速度为0,当Data=1时, 正转速度最大,当Data=-1,反转速度最大,支持浮点数。