控制pcDuino_Robot前进后退左转和右转
程序说明
通过方向键控制pcDuino Robot前进,后退,左转,右转和停止。
程序
程序如下图所示:
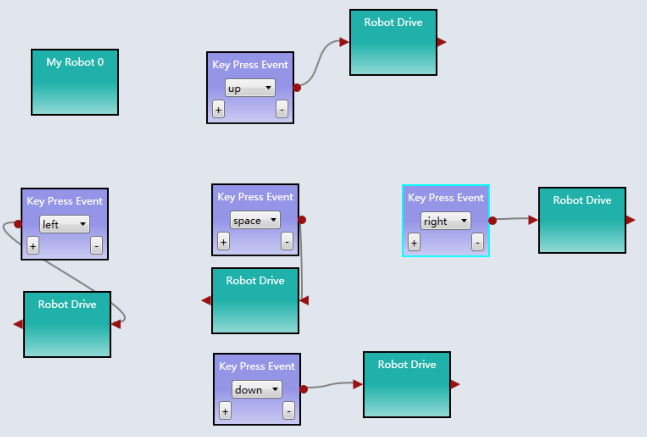 My Robot 0的设置与上一个例程设置一样,RobotDrive中的Partner,Left Wheel,RightWheel设置都一样,如下图所示:
My Robot 0的设置与上一个例程设置一样,RobotDrive中的Partner,Left Wheel,RightWheel设置都一样,如下图所示:
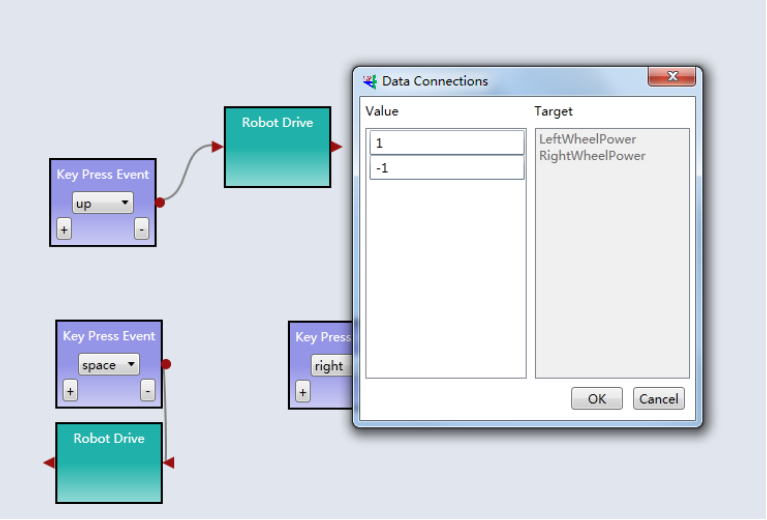
 前进的Data设置成 1 1 ,后退Data -1 -1,左转弯Data -1 1,右转弯Data 1 -1,停止Data 0 0。如下图:
前进的Data设置成 1 1 ,后退Data -1 -1,左转弯Data -1 1,右转弯Data 1 -1,停止Data 0 0。如下图:
 所有的设置好以后,既可以点击start按钮或者按F5键,然后通过按下PC端的方向键看小车能否按照指定的指示行动了。
所有的设置好以后,既可以点击start按钮或者按F5键,然后通过按下PC端的方向键看小车能否按照指定的指示行动了。
程序讲解
此程序是通过PC端的方向键通过程序映射到pcDuino_Robot,控制车的行为,此程序一旦某个方向键按下,小车会一直执行这个信号,所以对于控制小车,存在很多问题,当然这只是个测试,验证我们的程序思路是正确的,如果你想做出更好的控制可以加入定时器。