读取pcDuino Robot正前方以及右边的障碍物距离
程序说明
pcDuino Robot正前方和正右方分别有个距离检测传感器——超声波传感器。这次我们通过VIPLE编程,读取两边障碍物的距离。
程序
程序如下图所示:
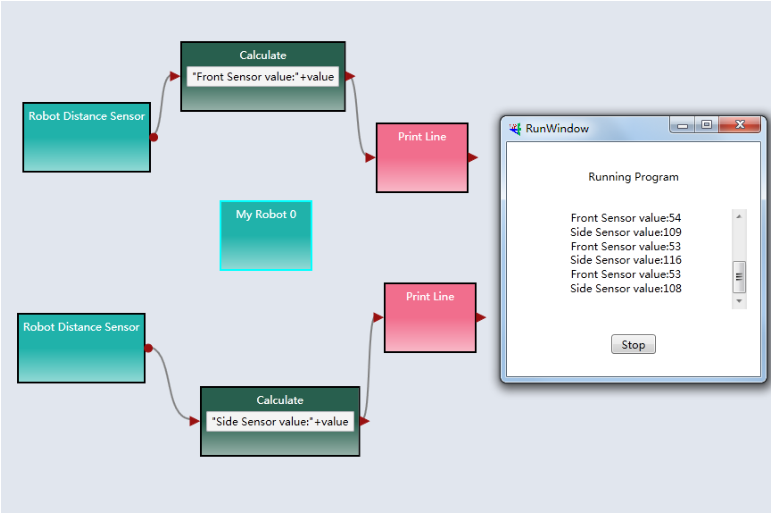
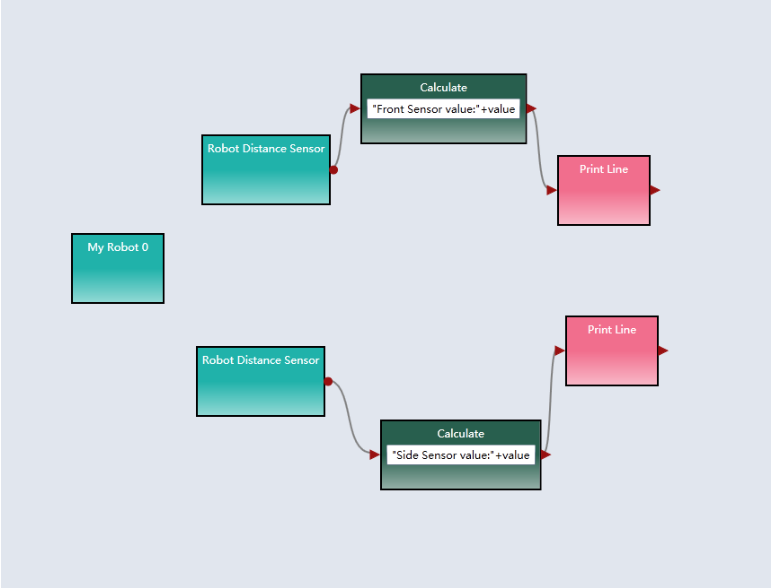 My Robot 0 的设置与前面的一样,Robot Distance Sensor中Partner都设置成My Robot 0,Sensor Port 分别设置成0和1。设置好, 点击run按钮就可以顺利地看到界面上输出小车前面与右边与障碍物之间的距离。此时可以用手放在传感器的前面,看下距离有没有变。结果如下图:
My Robot 0 的设置与前面的一样,Robot Distance Sensor中Partner都设置成My Robot 0,Sensor Port 分别设置成0和1。设置好, 点击run按钮就可以顺利地看到界面上输出小车前面与右边与障碍物之间的距离。此时可以用手放在传感器的前面,看下距离有没有变。结果如下图:
程序讲解
pcDuino Robot中有两个超声波距离传感器,每个超声波传感器 有两个信号引脚,分别为Trig和Echo,VIPLE中编号为0的超声 波的Trig和Echo分别与pcDuino 3B的PIN13和PIN3连接,VIPLE中编号为01 的超声波的Trig和Echo分别与pcDuino3B的PIN2和 PIN12连接,程序中Calculate的作用是给DistanceSensor输出的值前面加字符串,方便我们对打印出的值进行辨别,Print Line为打印输出模块。